Zastanawialiście się kiedyś, jak wygląda przepływ ruchu lotniczego w skali kraju, kontynentu czy świata? W momencie kiedy pisałem ten tekst nad Ziemią unosiło się 5.528 samolotów cywilnych korzystających z przestrzeni kontrolowanej, z czego w polskiej przestrzeni powietrznej było ich niespełna 100.
Według danych Eurocontrol za 2013 r. w ciągu doby w całej europejskiej przestrzeni powietrznej wykonuje się średnio 26.215 lotów, w trakcie których samoloty pokonują dystans ponad 40 mln kilometrów.W okresie od kwietnia 2013 r. do kwietnia 2014 r. było to w sumie 342.452 loty.W FIR Warszawa w 2013 r. wykonano 263.073 operacje lotnicze, w których realizowane były przewozy pasażerskie (regularne i czarterowe). Szacuje się, że w 2020 r. liczba operacji pax wyniesie w Polsce ponad 360.000.
Biorąc zatem pod uwagę fakt, iż ryzyko wypadku lotniczego wynosi 1:8 mln, czyli czysto statystycznie – pasażer, który codziennie wybiera jeden przypadkowy lot w dowolnym kierunku, zginąłby w katastrofie lotniczej po 21.000 lat, nasuwa się jedno pytanie… jak to możliwe, że przy tak wysokim (i stale rosnącym) natężeniu ruchu lotniczego sprowadzonym w większości przypadków do ograniczonej przestrzeni powietrznej (rejony i strefy kontrolowane lotnisk oraz drogi lotnicze), komunikacja lotnicza pozostaje nadal najbezpieczniejszą formą przemieszczania się?
Za bezpieczeństwem żeglugi powietrznej stoi rzesza wysoko wykwalifikowanych specjalistów korzystających z zaawansowanej technologicznie infrastruktury technicznej. Służba radarowa, której zadaniem jest m.in. separowanie statków powietrznych oraz monitorowanie ruchu lotniczego w celu wychwycenia sytuacji niebezpiecznych takich, jak sytuacje konfliktowe czy odchylenie od nominalnego toru lotu, a w razie potrzeby wektorowanie radarowe dla ominięcia ruchu, pełniona jest nieprzerwanie w całej przestrzeni kontrolowanej FIR Warszawa – pomiędzy FL 95 a FL 660.
Używane przez kontrolerów systemy radarowe dają możliwość wizualnego zobrazowania ostrzeżeń dotyczących bezpieczeństwa lotów, w tym również uprzedzeń co do sytuacji konfliktowych, ostrzeżeń o osiągnięciu minimalnej bezpiecznej wysokości bezwzględnej, oraz niezamierzonego dublowania indywidualnych kodów transpondera (SSR) nadawanych przez kontrolę ruchu w celu jednoznacznej identyfikacji samolotów.

- Panel transpondera Boeinga 737-800NG
Historia systemów dozorowania w cywilnej kontroli ruchu lotniczego sięga lat 40-tych ubiegłego stulecia, kiedy to na lotnisku w Indianapolis uruchomiono pierwszą na świecie wieżę kontroli lotów wyposażoną w urządzenia radiolokacyjne. Urządzenia te wykorzystywały zjawisko odbicia fal elektromagnetycznych od obiektu, a do określenia jego położenia stosowano pomiar czasu pomiędzy nadaniem impulsu elektromagnetycznego a jego odebraniem po odbiciu od obiektu. Te impulsowe radary obserwacji okrężnej nazwano pierwotnymi radarami dozorowania (PSR – ang. Primary Surveillance Radar), a techniki dozorowania wykorzystujące PSR – technikami aktywnymi z pasywną odpowiedzią, gdyż nie wymagają one żadnego wyposażenia pokładowego, jednak oprócz pozycji nie są w stanie dostarczyć żadnych dodatkowych informacji. Już w czasie II wojny światowej przekonano się, że echa radarowe nie umożliwiają rozróżnienia samolotów swoich od wrogich, co niekiedy kończyło się przypadkami ostrzeliwania sojuszników. Te i inne ograniczenia PSR spowodowały, że konieczne stało się unowocześnienie technik dozorowania ruchu lotniczego i stworzenie urządzenia instalowanego na pokładach samolotów, które reagowałoby na sygnał radarowy i pod jego wpływem generowało i emitowało dodatkowy sygnał odbierany następnie przez radar naziemny i wizualizowany na ekranie wyświetlacza.
System ten nazwano IFF (Identification Friend and Foe), czyli „Identyfikacja Przyjaciel lub Wróg” i stał się on prekursorem powszechnie obecnie stosowanych w kontroli ruchu lotniczego wtórnych radarów dozorowania (SSR – ang. Secondary Surveillance Radar), w których oprócz identyfikowania statków powietrznych na podstawie przydzielanego przez ATC i ustawianego manualnie przez pilota czterocyfrowego kodu squawk, w wysyłanej odpowiedzi zawarte są również inne informacje o parametrach lotu. Zasada działania systemów SSR opiera się na naziemnych stacjach zapytujących (interrogator) i pokładowym urządzeniu odzewowym (transponder). Interrogator wysyła tzw. zapytanie, czyli ciąg odpowiednio zakodowanych impulsów, a gdy transponder zainstalowany na pokładzie samolotu odbierze sygnał zapytania, automatycznie generuje w odpowiedzi ciąg impulsów, w których, w zależności od trybu pracy urządzenia pokładowego, zapisane są m.in. dane o pozycji samolotu oraz jego przyszłych intencjach (np. prędkość pozioma i pionowa).
Innym niezwykle istotnym zastosowaniem transponderów SSR jest system antykolizyjny TCAS (Traffic Collision Avoidance System), który działa zarówno w trybie ziemia – powietrze, jak i powietrze – powietrze (ACAS). Systemy naziemne analizują sytuację ruchową i plany lotów, a w razie możliwości powstania sytuacji konfliktowej informują o tym wizualnie kontrolera. Podobną informację otrzymuje pilot z tym, że ograniczoną oczywiście do trasy przelotu samolotu. Transponder na pokładzie samolotu wysyła do innych statków powietrznych zapytania o ich lokalizację oraz prędkość. Odbiornik TCAS analizuje te dane i odwzorowuje cały ruch w promieniu ok. 30-40 km w postaci znaczników na ekranie EHSI (Electronic Horizontal Situation Indicator) lub ND (Navigation Display), których kształt i kolor określają stopień kolizyjności z naszym kursem.
Pierwszy istotny poziom zagrożenia generowany przez TCAS to tzw. traffic advisory, czyli samolot, który się do nas podejrzanie zbliża. Ten poziom, oprócz informacji wizualnej w postaci żółtej ikonki jest również sygnalizowany komunikatem głosowym „traffic, traffic” i jest traktowany jako niebezpieczne zbliżenie skutkujące koniecznością wykonania dodatkowego manewru (zmiana kursu lub/i wysokości) dla uniknięcia kolizji.
Najwyższym stopniem zagrożenia jest tzw. resolution advisory, oznaczany czerwoną ikoną, przy którym pilot musi bezwzględnie wykonać manewr narzucony przez TCAS, niezależnie od poleceń ATC. Dopiero po jego zakończeniu i zażegnaniu zagrożenia pilot informuje kontrolę ruchu o zaistniałej sytuacji i kontynuuje lot do lotniska docelowego.
System ten jest jednak bezużyteczny wobec samolotów nie wyposażonych w transponder lub posiadających transponder pracujący jedynie w modzie A, co wyjaśnię w dalszej części bloga.

- Po prawej i lewej stronie zdjęcia widoczne pokładowe wyświetlacze systemu TCAS Boeinga 737-800NG
Dla potrzeb cywilnych służb kontroli ruchu lotniczego zapytania „ziemia-powietrze” wykonywane są w następujących trybach:
mode A – w tym trybie transponder wysyła ustawiony przez pilota zgodnie z wytycznymi ATC indywidualny kod transpondera – squawk, zapisywany kodem ósemkowym, czyli cyframi z przedziału 0 – 7.
Całkowita ilość możliwych do wygenerowania kodów squawk wynosi zatem 4096. Są one rozdzielane Państwom i obszarom zgodnie z regionalnymi porozumieniami żeglugi powietrznej, a sposób ich przydzielania samolotom wyklucza możliwość wykorzystania go dla jakiejkolwiek innej funkcji wewnątrz obszaru pokrycia danego SSR w określonym przedziale czasu. Dla zmniejszenia obciążenia pracą pilota i kontrolera, a także dla ograniczenia łączności kontroler/pilot, liczbę zmian kodów, które powinien dokonywać pilot, powinna być ograniczona do minimum.
Indywidualnym kodem SSR jest kod, w którym ostatnie dwie cyfry są różne od „00”. Z puli kodów do rozdziału wyłącza się tzw. kody specjalne, wykorzystywane w ściśle określonych sytuacjach. Są to: 7500 – uprowadzenie statku powietrznego, 7600 – utrata dwukierunkowej łączności, 7700 – sytuacja krytyczna, wymagająca natychmiastowej pomocy. Jeśli pilot ustawi kod 7500, a organ kontroli ruchu lotniczego żąda od niego potwierdzenia jego kodu, to powinien on potwierdzić ten kod lub nie odpowiadać w ogóle, przy czym brak odpowiedzi pilota oznacza, że użycie kodu specjalnego było działaniem zamierzonym.
Transponder samolotu wykonującego lot IFR, który nie otrzymał indywidualnego kodu squawk powinien mieć ustawioną wartość 2000. W podobnym przypadku, ale w odniesieniu do lotu VFR transponder powinien być nastawiony na 7000. W razie potrzeby rezerwuje się kody SSR do wyłącznego wykorzystania przez sanitarne statki powietrzne wykonujące loty w obszarach międzynarodowego konfliktu zbrojnego.
W formacie odpowiedzi transpondera występuje także dodatkowy impuls zwany symbolem SPI (ang. Special Position Indication), wywoływany na żądanie ATC, gdy jest to podyktowane potrzebą szybkiej identyfikacji samolotu w zatłoczonej przestrzeni. ATC wywołuje załogę poprzez użycie zwrotu „[znak wywoławczy], SQUAWK IDENT”. W odpowiedzi pilot włącza funkcję SPI i odpowiada „[znak wywoławczy] IDENTING”, co po rozpoznaniu ATC potwierdza komunikatem „RADAR CONTACT”.
Najważniejszym narzędziem rozdziału kodów SSR w Europie jest obecnie system ORCAM (Originating Region Code Assignment Method), który bazuje na rodzajach operacji i kierunkach wylotu z danego FIR.
Mode A pozwala zatem jedynie na identyfikację samolotu na podstawie kodu squawk, nie dostarczając żadnych dodatkowych informacji o parametrach lotu i z tego też powodu jest bezużyteczny w systemach zapobiegania kolizjom.
Więcej na temat zarządzania kodami SSR w europejskiej przestrzeni powietrznej znaleźć można w dokumencie Plan Żeglugi Powietrznej Regionu EUR ANP (Doc 7754), FASID, część IV (CNS), Supplement – SSR Code Allocation List for the EUR Region.
mode C – w tym trybie transponder podaje informację o wysokości barometrycznej odczytanej z układów awioniki samolotu. Z reguły mode C jest powiązany z modem A i występuje w trybie łączonym A/C.
Sprawdzanie dokładności informacji o poziomie lotu, uzyskanej za pomocą modu C i zobrazowanej na wskaźniku kontrolera, powinno być wykonywane przy użyciu łączności radiotelefonicznej co najmniej raz przez każdy odpowiednio wyposażony organ ATC przy wstępnym nawiązaniu kontaktu z załogą samolotu. Akceptowalna wartość tolerancji w przestrzeni o zredukowanym minimum separacji pionowej RVSM (w FIR Warszawa między FL 290 a FL 410) wynosi ±200 ft, a w pozostałej przestrzeni powietrznej ±300 ft.
mode S – zawiera unikatowy 24-bitowy kod identyfikacyjny przypisany na stałe do danego statku powietrznego, uzupełniony o dodatkowe informacje. Oznacza to, że w puli możliwych do rozdziału kodów jest ich 16.777.214. Występuje również w trybie łączonym z modami A i C.
Pełny zakres funkcji dozorowania modu S umożliwia przesyłanie: 24-bitowego adresu (kodu) statku powietrznego, kodu squawk, znaku wywoławczego (callsign) zawartego w planie lotu lub znaków rejestracyjnych statku powietrznego, informacji o funkcjonalności transpondera, wysokości barometrycznej zmierzonej z dokładnością do 25 ft, statusu lotu, meldunków TCAS/ACAS, kursu magnetycznego, prędkości względem ziemi (GS) i/lub liczby Macha, prędkości pionowej, wybranej wysokości ustawionej za pomocą autopilota, prędkości rzeczywistej (TAS), kąta przechylenia statku powietrznego, zmiany kąta drogi, geograficznego kąta linii drogi i prędkości podróżnej.
Użytkowane w dozorowaniu ruchu lotniczego wskaźniki wyświetlają kody samolotów w postaci znaków alfanumerycznych. Obok każdego znacznika echa wyświetlana jest etykieta zawierająca dane przetworzone przez systemy komputera z odpowiedzi transpondera. Poniżej wycinek screena z radaru APP Katowice zrobiony w jeden z czerwcowych dni.
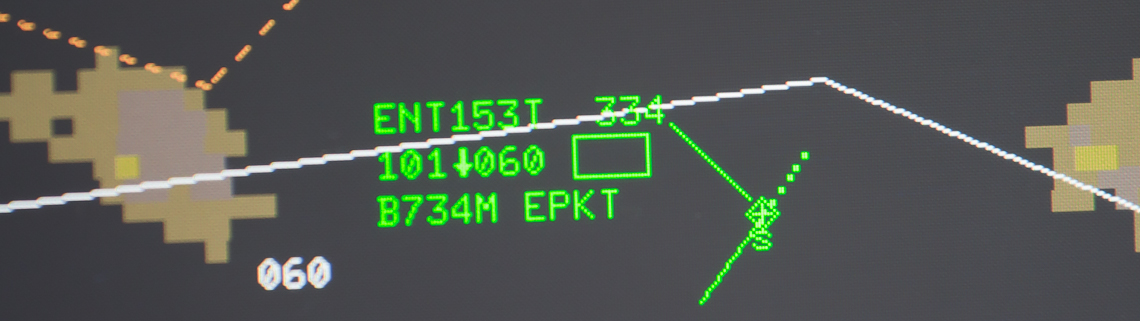
ENT153T – znak wywoławczy (callsign) samolotu
334 – prędkość pozioma GS w węzłach
101 – aktualna wysokość barometryczna w setkach stóp (tutaj: 10.100 ft = ok. 3 km)
↓ – zniżanie
060 – docelowa wysokość barometryczna w setkach stóp (tutaj: 6.000 ft)
B734 – samolot Boeing 737-400
M – kategoria turbulencji w śladzie aerodynamicznym (tutaj: M – medium, czyli średnie)
W CTR Katowice dostępny jest radar pierwotny kontroli zbliżania (TAR) służący do dozorowania lotniskowego ruchu lotniczego i monoimpulsowy radar wtórny (MSSR), którego maksymalny zasięg operacyjny wynosi 250 NM. Urządzenie to zlokalizowane jest w północnej części lotniska, a ze względu na swój charakterystyczny kształt i niemałe gabaryty, jest łatwe do rozpoznania przez wszystkich odwiedzających nasze lotnisko. W przypadku braku danych z tego radaru wykorzystywane są dane z radaru w Krakowie.

- Radar pierwotny kontroli zbliżania (TAR) w Katowice Airport
Pod koniec lat 70-tych ubiegłego wieku ICAO, czyli Międzynarodowa Organizacja Lotnictwa Cywilnego, widząc zagrożenie dalszego rozwoju transportu lotniczego w stosowaniu tradycyjnej radiolokacji, powołała komitet Future Air Navigation System, którego zadaniem było stworzenie koncepcji ewolucji systemów łączności, nawigacji i nadzoru dla celów zarządzania ruchem lotniczym.
Wypracowana strategia bazowała na wprowadzeniu nowej technologii opartej na cyfrowych łączach transmisji danych powietrze-ziemia oraz technologii satelitarnej. Stała się ona podstawą dla opracowania nowych technik dozorowania ruchu lotniczego takich, jak ADS-B (umożliwia on automatyczne, cykliczne przesyłanie parametrów lotu zmierzonych przez pokładowe systemy awioniki takich, jak: pozycja, kurs, prędkość) czy MLAT (pozycjonowanie samolotu odbywa się poprzez przeliczenie czasu odbioru sygnału przesyłanego z danego samolotu do kilku odbiorników naziemnych zainstalowanych na danym obszarze), które umożliwiły wprowadzenie zaawansowanych koncepcji zarządzania ruchem lotniczym nawet w najbardziej zatłoczonych segmentach przestrzeni powietrznej. Z zastosowaniem rozwiązań automatycznego zależnego dozorowania (ADS-B) możecie się spotkać w popularnym wśród amatorów podniebnych podróży flighttrackerze – Flightradar24, który zbiera dane z rozmieszczonych niemal po całym świecie odbiorników pracujących na częstotliwościach 1030 – 1090 MHz i prezentuje je w postaci mapy z wizualizacją ikon samolotów z przypisaną etykietą danych o prędkości poziomej i pionowej, wysokości, typie samolotu, znakach rejestracyjnych, położeniu itd.
Funkcjonujący w Polsce od kilku lat Program rozwoju sieci lotnisk i lotniczych urządzeń naziemnych jest spójny ze strategią dozorowania dla państw ECAC i zakłada stopniowy wzrost znaczenia nowych technik dozorowania opartych na MLAT i ADS-B kosztem tradycyjnej infrastruktury radiolokacyjnej. Rola radarów pierwotnych ma zostać ograniczona do ich wykorzystania na lotniskach i w przestrzeni TMA o dużym natężeniu ruchu lotniczego.
Tekst: Michał Stanek, JRP Katowice Airport
Zdjęcia: Piotr Adamczyk, PR Katowice Airport


Boeing 777 w pigułce
Czytaj
Klasyfikacja statków powietrznych
Czytaj